SBDQ-205B工業(yè)智能裝備性能健康感知及驗(yàn)證科研終端平臺(tái)
一、試驗(yàn)臺(tái)總體方案
工業(yè)智能裝備性能健康感知及驗(yàn)證科研終端平臺(tái)是用于主流工業(yè)終端設(shè)備的多狀態(tài)(健康、亞健康�、非健康)運(yùn)行的試驗(yàn)、測(cè)試�、驗(yàn)證系統(tǒng),并對(duì)過(guò)程中進(jìn)行故出現(xiàn)影響健康狀態(tài)特征進(jìn)行動(dòng)態(tài)捕捉�����,滿足對(duì)工業(yè)智能運(yùn)維常見(jiàn)故障特征信號(hào)����、機(jī)電設(shè)備故障監(jiān)測(cè)手段熟悉和了解,同時(shí)平臺(tái)熔接當(dāng)前智能化工廠執(zhí)行終端設(shè)備�,實(shí)現(xiàn)從基礎(chǔ)特征原理到真實(shí)應(yīng)用的直接輸出。同時(shí)過(guò)程中所有參數(shù)采用數(shù)字引擎驅(qū)動(dòng)�,嵌入預(yù)警和預(yù)測(cè)模型等算法,滿足機(jī)電設(shè)備健康狀態(tài)感知��、服役健康影響因素����、智能運(yùn)維體系建設(shè)的科研需求。
二�、工業(yè)智能裝備性能健康感知及驗(yàn)證科研終端平臺(tái)總體目標(biāo)
本平臺(tái)針對(duì)工業(yè)智能化運(yùn)維的科研需求,實(shí)現(xiàn)三大重要目標(biāo):
1)對(duì)工業(yè)傳動(dòng)裝備常見(jiàn)的故障進(jìn)行特征植入�;
2)對(duì)設(shè)備運(yùn)行過(guò)程中的特征進(jìn)行感知��;
3)搭建多元數(shù)據(jù)輸入和補(bǔ)償下的健康狀態(tài)模型
工業(yè)智能裝備性能健康感知及驗(yàn)證科研終端平臺(tái)具有以下功能:
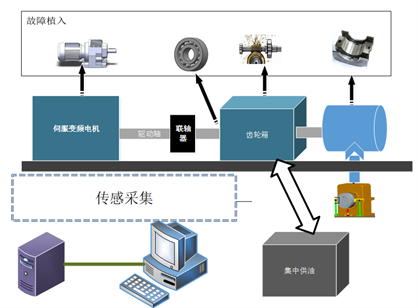
1)工業(yè)智能裝備性能健康感知及驗(yàn)證科研終端平臺(tái)對(duì)機(jī)電裝備的電機(jī)����、支撐����、傳動(dòng)�����、負(fù)載���、環(huán)境工況整體部分進(jìn)行全系預(yù)設(shè)�����,同時(shí)配置工業(yè)現(xiàn)場(chǎng)數(shù)據(jù)采集終端用于平臺(tái)數(shù)據(jù)的接入和輸出�。平臺(tái)具備不對(duì)中�、不平衡、軸系異常���、摩擦副異常磨損���、動(dòng)態(tài)負(fù)荷等故障的植入�����。
2)利用該平臺(tái)結(jié)合機(jī)器視覺(jué)����、紅外熱像�、振動(dòng)、噪聲�、、軸心軌跡�����、電機(jī)特征和摩擦磨損等在線監(jiān)測(cè)手段���,進(jìn)行過(guò)程中特征的捕獲����。
3)建立三維數(shù)字孿生模型�,具有與實(shí)際設(shè)備交互功能;可將Ansys處理后的模型和數(shù)據(jù)進(jìn)行動(dòng)態(tài)結(jié)合顯示����;自動(dòng)讀取工控機(jī)或服務(wù)器內(nèi)的數(shù)據(jù)�����,并根據(jù)數(shù)據(jù)格式解析為通用性數(shù)據(jù)�����;數(shù)據(jù)發(fā)送和下載�,可將平臺(tái)內(nèi)解析后的數(shù)據(jù)按標(biāo)準(zhǔn)格式通過(guò)Json或CSV格式進(jìn)行傳輸和下載���。
4)采用多種算法進(jìn)行健康狀態(tài)識(shí)別模型的搭建訓(xùn)練,并依據(jù)模型特征進(jìn)行不同工況下的驗(yàn)證測(cè)試��。
三���、工業(yè)智能裝備性能健康感知及驗(yàn)證科研終端平臺(tái)建設(shè)內(nèi)容
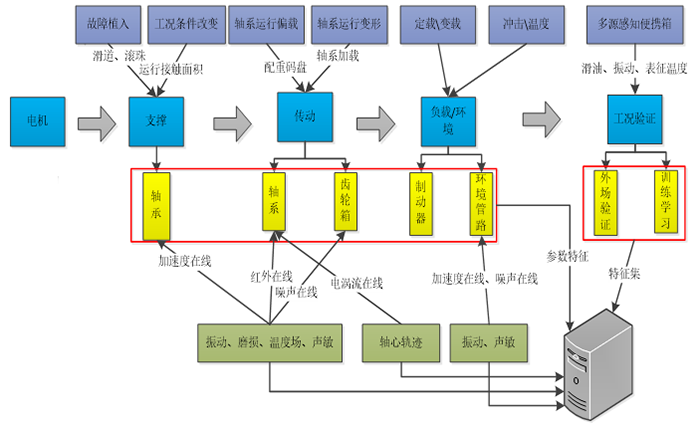
3.1平臺(tái)實(shí)施邏輯
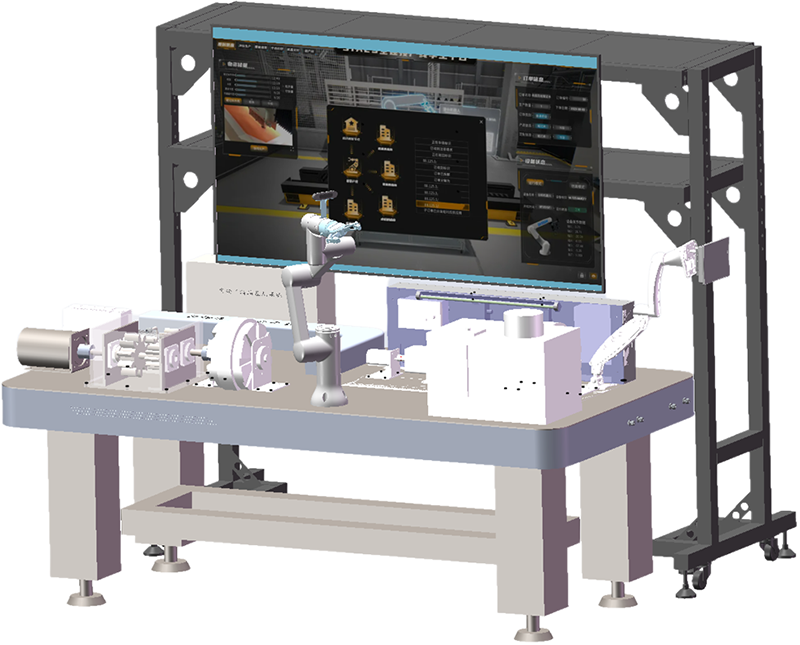
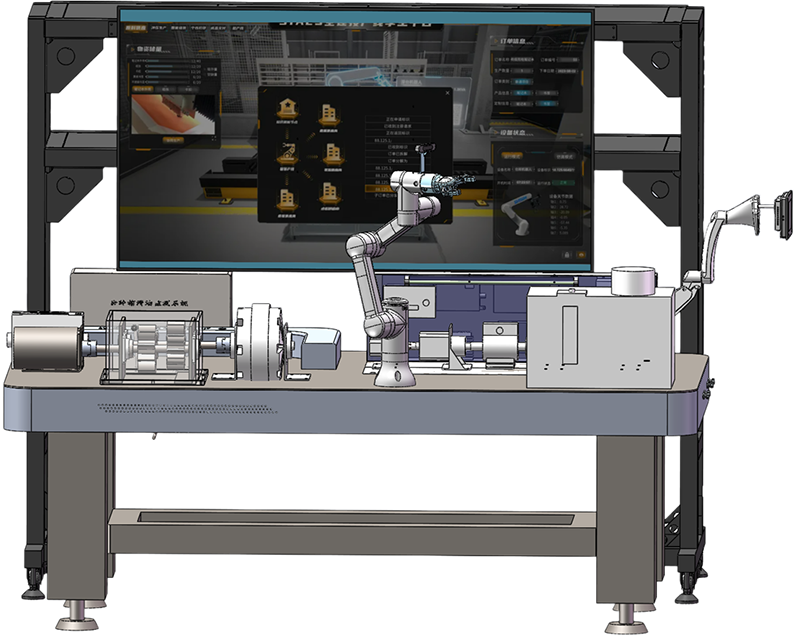
3.2運(yùn)行部分
本部分主要由幾部分構(gòu)成:驅(qū)動(dòng)部分�����、支撐部分�、傳動(dòng)部分�、加載部分�����、潤(rùn)滑工況部分�����、傳感部分�����、試驗(yàn)防護(hù)措施部分等組成�����。
3.3感知部分
采用熱成像��、機(jī)器視覺(jué)�����、振動(dòng)���、顯微成像、動(dòng)態(tài)扭矩等常規(guī)手段對(duì)工業(yè)設(shè)備運(yùn)行中的特征進(jìn)行捕獲�。
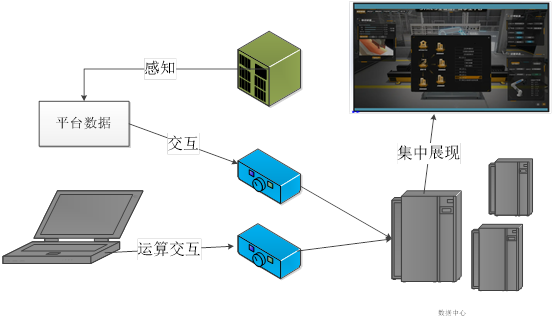
3.4交互部分
平臺(tái)采用數(shù)字模型的形式進(jìn)行顯示��,過(guò)程中同步動(dòng)態(tài)數(shù)據(jù)�����,同時(shí)具備模型接入端口�����,進(jìn)行訓(xùn)練數(shù)據(jù)的接入運(yùn)算�����。
四�����、工業(yè)智能裝備性能健康感知及驗(yàn)證科研終端平臺(tái)相關(guān)參數(shù)
4.1基礎(chǔ)部分參數(shù)表 |
名稱(chēng) | 分項(xiàng) | 實(shí)現(xiàn)方式 | 相關(guān)參數(shù) |
運(yùn)行部分 | 驅(qū)動(dòng) | 變頻電機(jī) | 功率5.5kw 轉(zhuǎn)速1440r/min,電壓380V�����,電流11.7A�,軸直徑38mm,輸出扭矩37N.m |
加載 | 磁粉制動(dòng) | 額定扭矩100N.m���,電壓24V���,電流2.4A�����,轉(zhuǎn)軸直徑35mm |
支撐 | 軸承座+軸承 | 旋轉(zhuǎn)軸直徑35mm��;軸承座型號(hào)為UCPH207 |
傳動(dòng) | 軸系傳動(dòng) | 旋轉(zhuǎn)軸直徑35mm |
齒輪箱傳動(dòng) | 平行軸���、星型傳動(dòng);速比3:1�; 軸徑20mm |
潤(rùn)滑 | 循環(huán)供油 | 容積10L;壓力0.2-0.6Mpa�; 油溫20-60℃ |
感知部分 | 機(jī)器視覺(jué) | 機(jī)械臂+雙目相機(jī) | 1.主要由機(jī)械臂、雙目相機(jī)���、相機(jī)支架�����、通訊電纜等組成�,可對(duì)顏色、形狀�����、文字進(jìn)行檢測(cè)識(shí)別��,可獨(dú)立使用也可以與其他模塊配合使用�; 2.雙目深度相機(jī)采用嵌入式硬件平臺(tái),可進(jìn)行高速的圖像處理�����,植入高精度定位與測(cè)量算法���; 3.具備紅外測(cè)距功能���; 4.分辨率:1920x1080像素分辨率; 5.傳感器:1/2.5”彩色傳感器���,幀緩存:32M; 6.通訊接口:RJ45千兆以太網(wǎng)��; 7.機(jī)械臂參數(shù):工作范圍:≥800 mm��;有效負(fù)荷:≥5 kg��;自由度:6個(gè);重復(fù)定位精度:±0.02 mm���; |
紅外成像 | 紅外成像相機(jī) | 1.探測(cè)器像素:640×480;探測(cè)器像元尺寸: 17μm��,響應(yīng)波長(zhǎng)范圍:7-14μm�; 2.結(jié)構(gòu):鏡頭�、顯示屏可旋轉(zhuǎn),顯示屏90°旋轉(zhuǎn)���,鏡頭旋轉(zhuǎn)可達(dá)180°��; 3.測(cè)溫范圍:-40到700℃�,300℃-2000℃(加裝高溫鏡頭)��; 4.調(diào)焦:連續(xù)自動(dòng)對(duì)焦/激光自動(dòng)聚焦等方式�; 5.幀頻:30Hz; |
顯微成像 | 傳感模塊 | 1.最大流體溫度:85℃�; 2.最大流體壓力0.2Mpa; 3.磨粒監(jiān)測(cè)范圍20-800微米��; 4.檢測(cè)磨粒粒徑精度:±5um�; 5.磨粒顏色識(shí)別:紅、黃、銀白��、黑四種顏色識(shí)別�����; 6.磨粒形狀識(shí)別:圓型�、橢圓、長(zhǎng)條�����、月牙����; |
振動(dòng) | 傳感模塊 | 1.輸入通道:4個(gè)模擬通道+1個(gè)相位通道; 2.輸入信號(hào):模擬通道:可接ICP加速度,聲傳感器���,速度���,電渦流位移傳感器;相位通道:脈沖/轉(zhuǎn)速(RPM�、觸發(fā)、相位)���; 3.采樣頻率:不低于51.2KHz/通道��; 4.分析頻率:20KHz/通道����; 動(dòng)態(tài)范圍:130dB�; |
噪聲 | 傳感模塊 | 1.測(cè)量誤差 : +/- 1.5dB轉(zhuǎn)換精度 2.加權(quán)動(dòng)態(tài)測(cè)量范圍 :30dB to 120dB 3.頻率響應(yīng):35 Hz to 20KHz 4.工作及存儲(chǔ)溫度 :-10 -----60℃ 5.工作及存儲(chǔ)濕度:10 ----- 90RH% |
其它參數(shù) |
硬件及性能 總重:<1000Kg 控制方式:程控?cái)?shù)據(jù)存儲(chǔ)方式:文件存儲(chǔ) 總功率:6kw 供電電壓:AC220 外形尺寸1200×2400×1400mm |
4.2故障預(yù)植入分項(xiàng)表 |
分項(xiàng)名稱(chēng) | 故障植入類(lèi)型 |
滾動(dòng)軸承故障 | 內(nèi)圈故障(裂紋、凹點(diǎn)) 外圈故障(裂紋�、凹點(diǎn)) 保持架故障 滾動(dòng)體故障(裂紋、剝落) 滑動(dòng)軸承瓦塊涂層剝落 | 單一故障+組合故障 |
齒輪故障 | 彎曲疲勞與斷齒 齒面接觸疲勞 齒面膠合和擦傷 齒面點(diǎn)蝕剝落 | 單一故障+組合故障 |
傳動(dòng)軸故障 | 不對(duì)中 不平衡 軸心偏移 軸塑性變形 | 單一故障 |
五�����、工業(yè)智能裝備性能健康感知及驗(yàn)證科研終端平臺(tái)特色及輸出
5.1多工況下工業(yè)設(shè)備全壽命周期模擬
5.2機(jī)器視覺(jué)感知引導(dǎo)下的多傳感融合
5.3基于數(shù)據(jù)數(shù)據(jù)引擎訓(xùn)練下的健康感知模型
5.4基于數(shù)字孿生的真實(shí)場(chǎng)景特征數(shù)據(jù)數(shù)字展現(xiàn)